Modelling choices
This page provides practical guidelines for selecting solver settings and modelling choices in STEM, including mesh resolution, time step selection, and Rayleigh damping parameters. These guidelines are based on common practices in computational mechanics and wave propagation problems, and can help users configure their simulations for accuracy and efficiency.
Model initialisation
Quasi-static initialisation followed by dynamic analysis is a common approach for simulating the response of systems that are initially at rest or in equilibrium.
Element size
For dynamic analysis, the element size should be chosen to adequately resolve the wave propagation in the model. A common rule of thumb is to use at least 10 elements per wavelength for first-order elements and 5-10 elements per wavelength for second-order elements.
The wavelength, \(\lambda\), can be estimated from the shear wave speed, \(c_{s}\), and the maximum frequency of interest \(f_{max}\) as:
The maximum element size, \(h\), can then be estimated as:
where \(n_{\lambda}\) is the number of elements per wavelength. In practice, the choice of element size may also be influenced by other factors such as the geometry of the model, the material properties, and the computational resources available.
Time step selection
In STEM it is recommended to use the Newmark time integration scheme (formulated explicitly). Two common guidelines for selecting the time step are:
Frequency condition: the time step should be small enough to accurately resolve the highest sinusoidal frequency of interest in the response, typically by ensuring that each period of that frequency is represented by a sufficient number of time steps (e.g., 10 points per cycle) to avoid numerical dispersion and phase error.
where \(n_t\) is the number of time steps per period (e.g., 5-10) to ensure accuracy.
Courant condition: the time step must be sufficiently small such that numerical information does not propagate faster than the physical wave speed of the system. This means that the time step should be less than a critical value proportional to the smallest element size divided by the highest wave speed (compression wave speed \(c_p\)).
where \(n_c\) is a safety factor (e.g., 5-10) to ensure accuracy.
The more restrictive of these two conditions should be used to ensure stability and accuracy in the simulation
Rayleigh damping parameters
STEM offers the possibility of including Rayleigh damping in the model, which is commonly used in dynamic finite element analyses to represent material and numerical dissipation. The damping matrix is defined as a linear combination of the mass, \(\mathbf{M}\), and stiffness, \(\mathbf{K}\), matrices:
where \(\alpha\) is the mass-proportional damping coefficient and \(\beta\) is the stiffness-proportional damping coefficient. This figure illustrates the frequency-dependent damping ratio for Rayleigh damping.
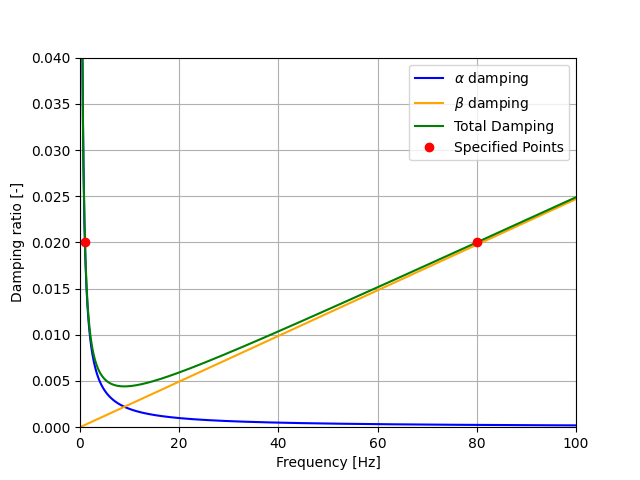
The mass-proportional damping introduces increasing attenuation at low frequencies. The stiffness-proportional damping introduces increasing attenuation at high frequencies and may lead to excessive numerical dissipation.
To determine the Rayleigh damping coefficients (\(\alpha\) and \(\beta\) - in STEM called
rayleigh_m and rayleigh_k), it is common to specify
target damping ratios (\(\zeta_1\) and \(\zeta_2\)) at two frequencies of interest
(\(\omega_1\) and \(\omega_2\)), and then solve for the coefficients that achieve
those damping ratios at those frequencies.
A helper function to compute the Rayleigh damping coefficients from target damping ratios and frequencies follows:
import numpy as np
def damping_Rayleigh(f1: float, d1: float, f2: float, d2: float) -> tuple[float, float]:
"""
Rayleigh damping coefficients calculation
Args:
f1 (float): frequency 1 (Hz)
d1 (float): damping ratio at frequency 1
f2 (float): frequency 2 (Hz)
d2 (float): damping ratio at frequency 2
Returns:
tuple[float, float]: alpha (mass-proportional), beta (stiffness-proportional)
"""
if f1 == f2:
raise SystemExit('Frequencies for the Rayleigh damping are the same.')
# damping matrix
damp_mat = 1 / 2 * np.array([[1 / (2 * np.pi * f1), 2 * np.pi * f1],
[1 / (2 * np.pi * f2), 2 * np.pi * f2]])
damp_qsi = np.array([d1, d2])
# solution
coefs = np.linalg.solve(damp_mat, damp_qsi)
return coefs[0], coefs[1]
if __name__ == "__main__":
f1 = 1 # Hz
d1 = 0.02 # 2% damping at f1
f2 = 80 # Hz
d2 = 0.02 # 2% damping at f2
alpha, beta = damping_Rayleigh(f1, d1, f2, d2)
print(f"Rayleigh damping coefficients:\n\trayleigh_m: {alpha}\n\trayleigh_k: {beta}")
Linear solver type
STEM provides several linear solvers: STEM has several linear solvers available, including:
LU decomposition (direct)
Conjugate Gradient (iterative)
Algebraic Multigrid (iterative)
LU decomposition is best suited for small problems. For large problems, the iterative solvers are recommended, as they scale better and can use preconditioners to improve convergence. STEM uses the Jacobi preconditioner by default, a simple diagonal preconditioner suitable for symmetric positive definite systems.