Railway track
This page outlines how to define the railway track, the irregularities and rail joint in STEM.
Railway track
To model the railway track, it is necessary to define the rail, railpad and sleepers.
Rail
The rail consists of a Euler-Bernoulli beam element. Since the rail properties are well-know, STEM provides default materials for the rail, which can be used as follows:
from stem.default_materials import DefaultMaterial
# Rail and sleeper parameters
rail_parameters = DefaultMaterial.Rail_54E1_3D.value.material_parameters
STEM supports the following types of rails:
Rail_46E3_3D
Rail_54E1_3D
Rail_60E1_3D
Custom rail materials can be defined as a Euler-Bernoulli beam material:
from stem.structural_material import StructuralMaterial, EulerBeam
name = "custom_rail"
beam_object = EulerBeam(ndim=3, DENSITY=7850, YOUNG_MODULUS=2.1e11, POISSON_RATIO=0.3,
CROSS_AREA=0.006977, I33=2.3372e-05, I22=2.787e-06, TORSIONAL_INERTIA=2.616E-05)
rail_parameters = StructuralMaterial(name=name, material_parameters=beam_object.value.material_parameters
Railpad
The railpad is modelled as a spring-damper system, which can be defined as follows:
from stem.structural_material import ElasticSpringDamper
rail_pad_parameters = ElasticSpringDamper(
NODAL_DISPLACEMENT_STIFFNESS=[0, 750e6, 0],
NODAL_ROTATIONAL_STIFFNESS=[0, 0, 0],
NODAL_DAMPING_COEFFICIENT=[0, 750e3, 0],
NODAL_ROTATIONAL_DAMPING_COEFFICIENT=[0, 0, 0]
)
Sleepers
The sleeper can be modelled in two different ways, depending on the level of detail required for the analysis. The sleeper can be either modelled as a concentrated mass or as a volume element.
The following example shows how to model the sleeper as a concentrated mass:
from stem.structural_material import NodalConcentrated
sleeper_parameters = NodalConcentrated(NODAL_DISPLACEMENT_STIFFNESS=[0, 0, 0],
NODAL_MASS=140,
NODAL_DAMPING_COEFFICIENT=[0, 0, 0])
To model the sleeper as a volume element the sleeper material is defined as the soil material (see Soil materials).
from stem.soil_material import SoilMaterial, OnePhaseSoil, LinearElasticSoil, SaturatedBelowPhreaticLevelLaw
soil_formulation = OnePhaseSoil(ndim, IS_DRAINED=True, DENSITY_SOLID=2400, POROSITY=0.0)
constitutive_law = LinearElasticSoil(YOUNG_MODULUS=30e9, POISSON_RATIO=0.2)
sleeper_parameters_soil = SoilMaterial(name="sleeper",
soil_formulation=soil_formulation,
constitutive_law=constitutive_law,
retention_parameters=SaturatedBelowPhreaticLevelLaw())
The sleeper geometry should also be specified.
sleeper_height = 0.3
sleeper_length = 2.8 / 2
sleeper_width = 0.234
sleeper_dimensions = [sleeper_width, sleeper_height, sleeper_length]
distance_middle_sleeper_to_rail= 0.43
Railway track generation
The railway track is built by assembling the rail, railpad and sleepers. Depending on the sleeper modelling strategy, the track can be generated by using the following function, for the case of modelling the sleeper as a concentrated mass:
origin_point = [0.75, 3.0, 0.0]
direction_vector = [0, 0, 1]
n_sleepers = 0.6
number_of_sleepers = 101
sleeper_spacing = 0.6
rail_pad_thickness = 0.025
name = "track"
model.generate_straight_track(sleeper_distance,
n_sleepers,
rail_parameters,
sleeper_parameters,
rail_pad_parameters,
rail_pad_thickness,
origin_point,
direction_vector,
name)
For the case of modelling the sleeper as a volume element, it follows (including the sleeper dimensions and the distance between the middle of the sleeper and the rail as defined above):
origin_point = [0.75, 3.0, 0.0]
direction_vector = [0, 0, 1]
n_sleepers = 0.6
number_of_sleepers = 101
sleeper_spacing = 0.6
rail_pad_thickness = 0.025
name = "track"
model.generate_straight_track(sleeper_distance,
n_sleepers,
rail_parameters,
sleeper_parameters_soil,
rail_pad_parameters,
rail_pad_thickness,
origin_point,
direction_vector,
name,
sleeper_dimensions,
distance_middle_sleeper_to_rail,
)
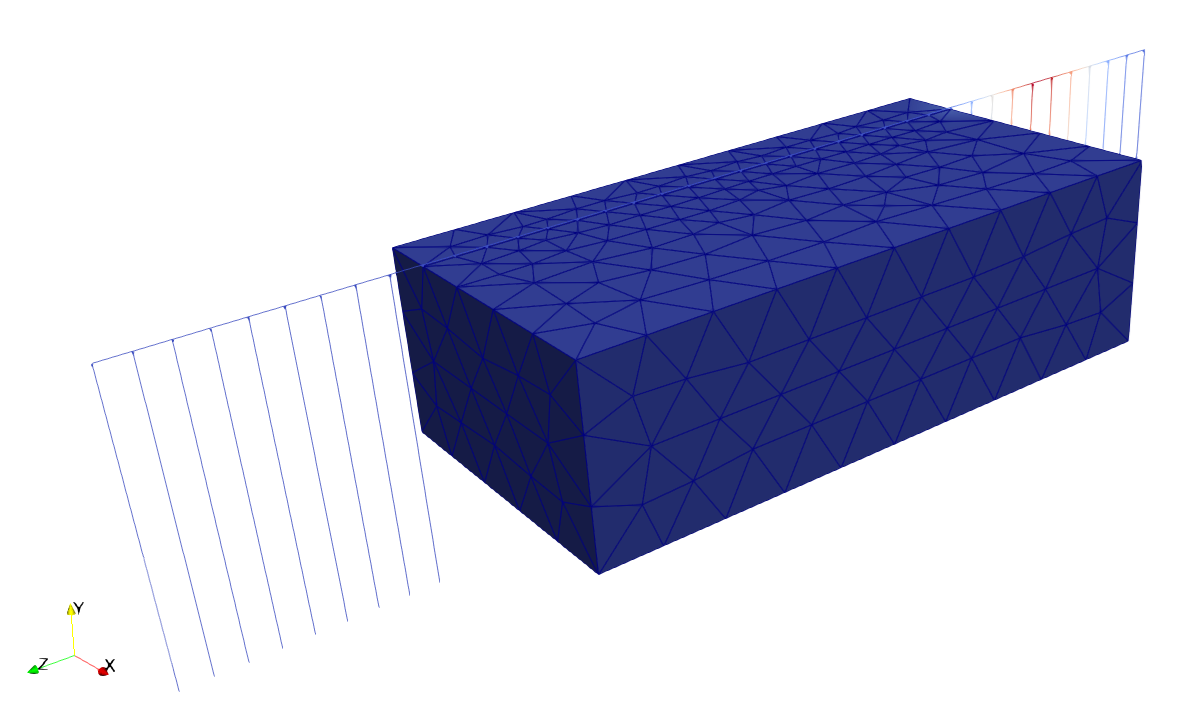
To reduce the size of the soil domain, the railway track can be generated partially outside the model geometry by extending it beyond the domain boundaries. The extended part of the track is supported by a one-dimensional spring-damper system, which represents the soil behavior using 1D elements.
An extended straight track can be generated as follows:
direction_vector = [0, 0, 1]
n_sleepers = 0.6
number_of_sleepers = 101
sleeper_spacing = 0.6
rail_pad_thickness = 0.025
length_soil_equivalent_element = 5
name = "extended_track"
soil_equivalent_parameters = ElasticSpringDamper(NODAL_DISPLACEMENT_STIFFNESS=[0, 71e6, 0],
NODAL_ROTATIONAL_STIFFNESS=[0, 0, 0],
NODAL_DAMPING_COEFFICIENT=[0, 71e3, 0],
NODAL_ROTATIONAL_DAMPING_COEFFICIENT=[0, 0, 0])
model.generate_extended_straight_track(n_sleepers,
number_of_sleepers,
rail_parameters,
sleeper_parameters,
rail_pad_parameters,
rail_pad_thickness,
origin_point,
soil_equivalent_parameters,
length_soil_equivalent_element,
direction_vector,
name)
The figure below illustrates an example of a railway track generated with an extended track section.
Irregularities
The track irregularities can be applied in STEM in combination with the UVEC. To apply irregularities to the UVEC model, the user can define the argument irregularities in the UVEC model as a dictionary with the following parameters:
Av: vertical track irregularity amplitude parameter
omega_c: critical wave number (Optional, default value 0.8242 rad/m)
f_min: minimum spatial frequency for the PSD of the unevenness (Optional, default 2 1/m)
f_max: maximum spatial frequency for the PSD of the unevenness (Optional, default 500 1/m)
N: number of frequency increments (Optional, default 2000)
seed: seed for random generator (Optional, default 14)
The irregularities are modelled following [7], and the parameter Av can be estimated based on the track quality [2]. In case that irregularities are not required, the irregularities argument must be set to None.
irr_parameters = {"Av": 2.095e-05, "seed": 14}
uvec_load = UvecLoad(direction_signs=[1, 1, 1],
velocity=40,
origin=[0.75, 10, 0],
uvec_parameters=uvec_parameters,
uvec_model=uvec,
train_type=TrainType.PASSENGERS_HEAVY,
irregularities=None,
rail_joint=joint_parameters,
)
For additional details about the UVEC model, see User-defined vehicle model, and for additional details about the track irregularities, see Irregularities model.
Rail joints
To model the rail joints, hinges can be added to the beam elements of the rail at the location of the joints. The stiffness of the hinges can be defined based on the properties of the rail and the joint.
The irregularities of the rail joint can be modelled (see Rail joint model) by setting the
argument rail_joint in the UVEC model as a dictionary with the parameters location_joint,
depth_joint and width_joint. The location_joint represents the Euclidian distance in relation to the load
origin of the UVEC model.
In case that rail joints are not required, the rail_joint argument must be set to None.
distance_joint = 35.75
hinge_stiffness_y = 37.8e7
hinge_stiffness_z = 37.8e7
model.add_hinge_on_beam("rail_track", [(0.75, 3 + rail_pad_thickness, distance_joint)],
HingeParameters(hinge_stiffness_y, hinge_stiffness_z), "hinge")
joint_parameters = {"location_joint": distance_joint, # joint location [m]
"depth_joint": 0.01, # depth of the joint [m]
"width_joint": 0.25, # width of the joint [m]
}
uvec_load = UvecLoad(direction_signs=[1, 1, 1],
velocity=40,
origin=[0.75, 10, 0],
uvec_parameters=uvec_parameters,
uvec_model=uvec,
train_type=TrainType.PASSENGERS_HEAVY,
irregularities=None,
rail_joint=joint_parameters,
)